A quadrature encoder counter sits at the center of motion feedback in automation systems. When counting errors appear, teams often assume the counter itself failed. In reality, most quadrature encoder counter issues originate from how the system behaves under real operating conditions rather than from an isolated hardware fault.
Automation environments expose encoder counters to noise, thermal stress, vibration, and system-level interaction effects. These factors rarely cause immediate breakdowns. Instead, they create intermittent failures that disrupt motion accuracy, confuse diagnostics, and slow production recovery.
In this guide, you will learn why quadrature encoder counter failures occur in automation systems, how environment and integration amplify risk, and what engineering and sourcing decisions help prevent long-term reliability issues.
Key Takeaways
Failures appear as instability, not total loss
Real operating conditions often exceed design assumptions.
Most quadrature encoder counter failures originate outside the component
Drives, controllers, and feedback loops turn minor miscounts into major disruptions.
Assessing environment, integration, and sourcing upfront improves stability and uptime.
What Failure Looks Like in Live Automation Systems?
Quadrature encoder counter failures rarely appear as complete signal loss. Most issues surface as behavior changes that are difficult to reproduce during testing.
Common failure patterns include:
Missed or extra counts during high-speed motion
Gradual position drift over extended operation
Sudden machine stops triggered by control mismatches
False alarms without clear hardware faults
Frequent recalibration to restore acceptable accuracy
These symptoms confuse maintenance teams because the system often recovers temporarily. Without addressing the underlying cause, the same issues return under load.
Many teams question why these failures occur even when specifications appear correct.
Why Correct Specifications Still Fail on the Plant Floor?
Specification sheets assume stable signals, clean power, and ideal installation conditions. Automation systems rarely meet these assumptions.
Quadrature encoder counters often fail because:
Signal integrity degrades after installation
Power quality varies under production loads
Mechanical vibration affects connections over time
Integration introduces timing or reference mismatches
Validation focuses on the startup, not the continuous operation
Meeting specifications does not account for how systems behave after weeks or months of production. Failures emerge as conditions drift away from ideal assumptions.
Environmental stress accelerates this gap between design intent and real operation.
Environment-Driven Stress that Breaks Encoder Counters
Environmental exposure plays a major role in quadrature encoder counter failure. These stresses rarely act alone. They compound over time.
Key stress factors include:
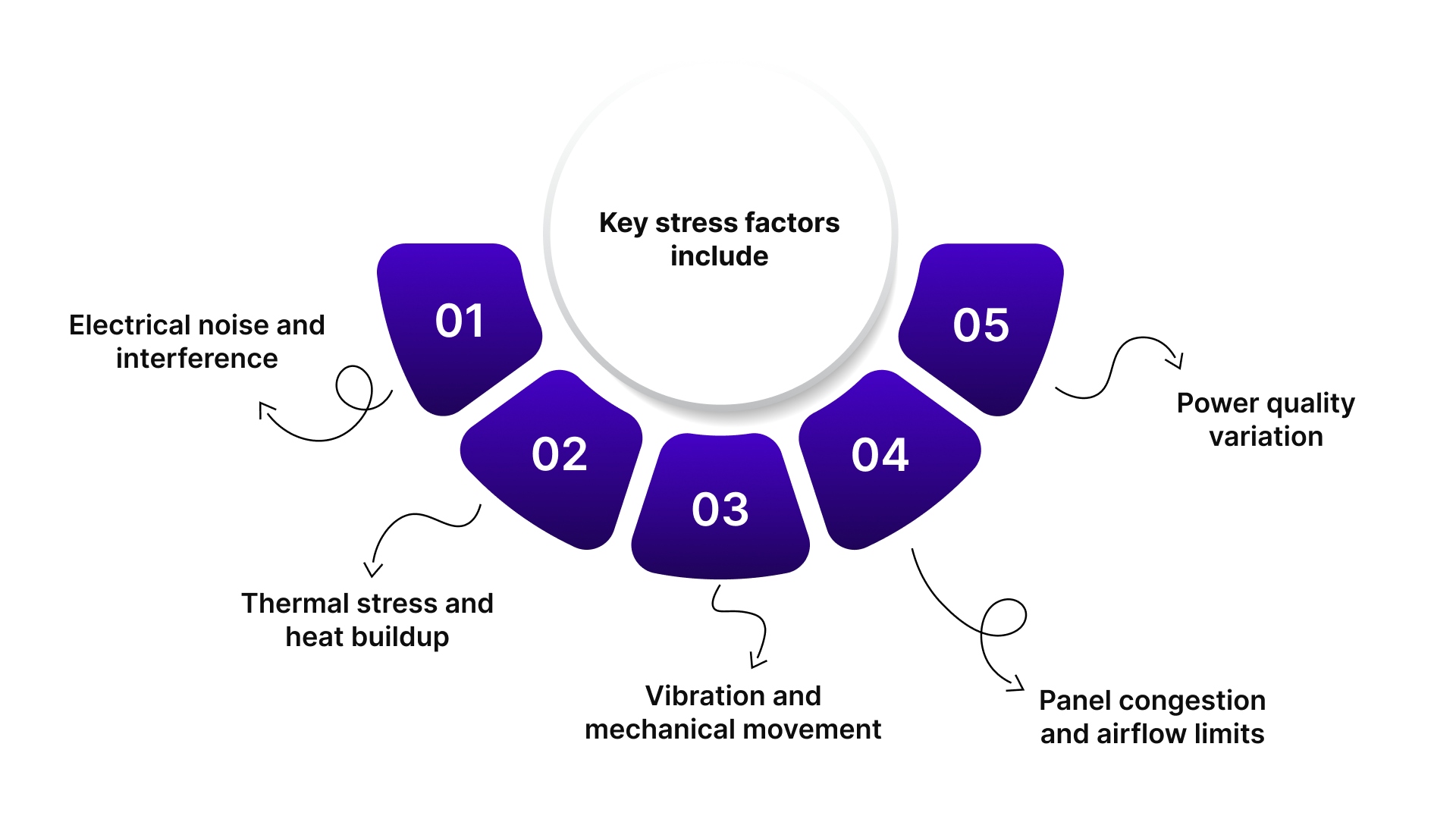
Electrical noise and interference: Motors, drives, and switching devices introduce noise that corrupts count signals, especially when grounding and shielding are inadequate.
Thermal stress and heat buildup: Continuous operation and crowded panels raise temperatures. Thermal drift affects timing thresholds and signal stability.
Vibration and mechanical movement: Constant vibration loosens connectors and degrades signal paths, leading to intermittent counting errors.
Panel congestion and airflow limits: Tight enclosures amplify heat and interference, increasing long-term stress on encoder counter circuits.
Power quality variation: Voltage fluctuations and transient events disrupt logic behavior, increasing the risk of miscounts.
Environmental stress rarely causes isolated faults. It interacts with system behavior.
For stable operation in demanding automation environments, Pico System offers Universal PWM Controllers, Universal Stepper Controllers, Connector Panels, and more.
View our categories to evaluate control and interface solutions built for real-world industrial conditions.
Now, let’s discuss how system-level interactions amplify counter failures.
System-Level Interactions that Amplify Counter Failures
A quadrature encoder counter does not operate independently. It interacts continuously with drives, controllers, and feedback devices.
Failure amplification occurs when:
Feedback loops magnify small count errors
Latency mismatches disrupt synchronization
Multiple devices share grounding references
Drive switching noise overlaps with encoder timing
Control logic reacts aggressively to unstable signals
These interactions turn small counting errors into system-wide instability. What starts as a minor miscount can trigger motion errors, alarms, or shutdowns across the automation system.
These effects directly impact operational performance.
How Encoder Counter Failures Affect Operations and Output?
For plant heads and operations leaders, quadrature encoder counter failures show up as operational disruption, not electronic faults.
Common impacts include:
Reduced uptime from unexplained stops
Reduced confidence in automation scalability
Scrap and rework caused by motion inaccuracies
Increased maintenance effort without permanent resolution
Longer troubleshooting cycles due to inconsistent symptoms
For business owners, these issues raise operational risk and increase dependence on reactive maintenance.
Preventing these outcomes requires a shift in engineering evaluation.
What Engineers Should Evaluate to Prevent Counter Failures
Engineers should evaluate quadrature encoder counters based on failure behavior, not ideal operation.
Key evaluation areas include:
Interaction with drives and control logic
Accessibility for diagnostics and maintenance
Behavior during degraded or unstable conditions
Signal robustness under noise and thermal stress
Grounding and isolation strategy across the system
Designing for stability under stress helps engineers avoid recurring failures that only appear in production.
Engineering decisions alone are not enough. Procurement choices also influence reliability.
Procurement Risks that Quietly Increase Failure Rates
Procurement decisions influence quadrature encoder counter reliability long after installation.
Common sourcing risks include:
Limited documentation for setup and integration
Slow response to field issues and support needs
Short product lifecycles or replacement uncertainty
Inconsistent manufacturing revisions across batches
Selecting counters without automation-specific context
These risks increase long-term maintenance effort and operational uncertainty.
Automation-focused suppliers approach encoder counter design differently.
Quadrature Encoder Counters Built for Automation Systems
Manufacturers focused on automation systems design, quadrature encoder counters with real operating conditions in mind. Their designs prioritize stable integration with motion controllers, drives, and feedback networks.
Pico Systems supports automation environments by developing encoder counter solutions aligned with motion-driven applications. This system-level focus helps reduce integration friction and long-term failure risk in demanding industrial settings.
Conclusion
Quadrature encoder counter failures rarely result from a single faulty component. They emerge from the interaction between environment, system design, and sourcing decisions.
To reduce failure risk, teams should evaluate environmental exposure early, assess system-level interactions, not isolated components, design for stability under degraded conditions, and align sourcing with automation-specific requirements.
Pico Systems supports reliable motion feedback through automation-aligned encoder counter solutions designed for long-term operation.
If you are evaluating encoder counting reliability in automation systems, get in touch to discuss your application or explore our motion and encoder solutions catalog.
Frequently Asked Questions
1. Why do quadrature encoder counters fail intermittently?
Quadrature encoder counters fail intermittently because environmental stress, noise, and system interactions disrupt signal integrity over time. These issues rarely cause permanent damage but create unstable conditions that trigger miscounts during real operation.
2. Are quadrature encoder counter failures usually hardware faults?
No, most failures result from integration issues, environmental exposure, or system interactions rather than defective hardware. Poor grounding, noise coupling, and thermal stress often create symptoms that mimic hardware failure.
3. How does the environment accelerate quadrature encoder counter degradation?
Harsh environments introduce electrical noise, vibration, and heat that degrade signal stability and timing accuracy. Over time, these stresses increase miscounts and intermittent behavior, especially during continuous production.
4. Can software filtering prevent encoder counter failures?
Software filtering can reduce noise effects, but cannot fully compensate for unstable signals or poor system integration. Hardware-level stability and proper setup remain essential for long-term reliability.
5. When should automation teams redesign encoder counter architecture?
Teams should reassess architecture when miscounts recur, troubleshooting becomes repetitive, or environmental conditions change. Early redesign reduces downtime and prevents escalating maintenance costs.