Industrial robots don’t fail because they lack power; they fail when motion becomes unpredictable. Missed positions, vibration, inconsistent acceleration, or lost steps can turn a precise robotic system into an unreliable one.
That’s where motion control for industrial robotics matters most.
Motion control defines how accurately a robot moves, how smoothly it transitions between positions, and how reliably it repeats those movements over thousands of cycles. It governs position, velocity, and torque at the hardware level, long before software logic comes into play.
Key Takeaways
Motion control regulates position, velocity, and acceleration for precise robotic movement.
Industrial robotics rely on electromechanical actuators with closed-loop feedback for accuracy.
Applications span manufacturing, aerospace, automotive, healthcare, and more.
Pico Systems controllers and converters simplify integration, enhance feedback, and improve repeatability.
Choosing the right motion control hardware ensures predictable, stable, and high-performance robotic operations.
What Is Motion Control for Industrial Robotics?
Motion control for industrial robotics refers to the systems that move a load in a controlled and repeatable manner by regulating position, speed, and acceleration. Precise motion control is critical for tasks such as positioning, path following, and high-cycle automation.
Motion control systems may use pneumatic, hydraulic, or electromechanical actuation. Industrial robots predominantly use electromechanical systems due to their precision, speed, efficiency, and flexibility. In these systems, electric motors act as the primary actuators and generate either rotary or linear motion.
Robotic motion control relies on closed-loop feedback. The system continuously compares commanded motion with actual motion and corrects errors in real time.
In a typical servo-based robotic system:
The controller plans the motion and closes the outer loop, usually position or velocity.
The drive or amplifier closes the inner loops, typically current and velocity, and converts low-energy command signals into motor power.
The motor generates the force required to move the robotic load.
Feedback devices, such as encoders or resolvers, report actual motion back to the system.
Together, these elements form a closed-loop servo system that enables accurate position, velocity, and acceleration control in industrial robots.
History of Motion Control for Industrial Robotics
The evolution of motion control for industrial robotics is closely tied to the broader development of industrial automation. Each major shift in manufacturing technology introduced new ways to control motion with greater accuracy, reliability, and efficiency.
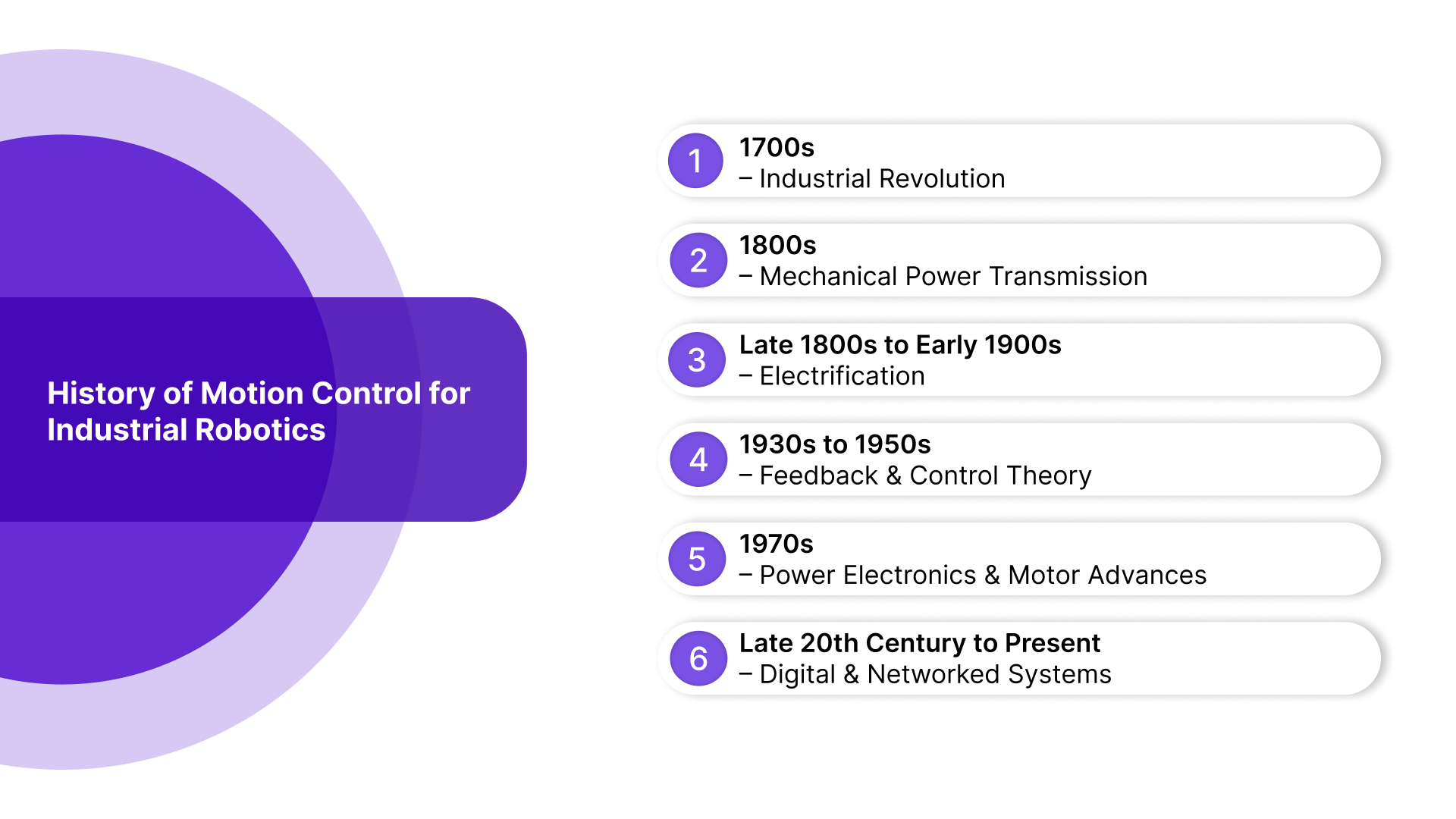
1700s – Industrial Revolution
Early mechanical systems marked the first attempts at controlled motion. These machines established the foundational principles that later motion control technologies would build upon.
1800s – Mechanical Power Transmission
Factory automation relied on belt-and-pulley systems driven by centralized power sources such as water wheels and steam engines. Motion control was entirely mechanical and lacked precision.
Late 1800s to Early 1900s – Electrification
The introduction of DC generators and AC motors enabled distributed power and more flexible machine design. Electrically driven production lines, popularized by mass manufacturing, accelerated the need for controlled motion.
1930s to 1950s – Feedback and Control Theory
Negative feedback concepts and the adoption of PID control improved stability and accuracy. These developments formed the basis of closed-loop control used in modern servo systems.
1970s – Power Electronics and Motor Advances
Pulse width modulation (PWM) and brushless permanent magnet motors significantly improved efficiency, responsiveness, and control resolution.
Late 20th Century to Present – Digital and Networked Systems
Digital signal processing enabled compact, high-performance controllers and drives. Industrial communication protocols and open standards improved system integration, scalability, and reliability across robotic applications.
Today’s industrial robots rely on this progression of technologies to deliver precise, high-speed, and coordinated motion across complex automation environments.
Main Components of a Motion Control System
A motion control system is built from a small set of core components that work together to deliver precise, repeatable movement. In motion control for industrial robotics, each component directly affects accuracy, responsiveness, and system stability.
Component | Function | Key Notes / Types |
Controller | Generates motion paths and corrects errors using feedback | Microcontroller, PLC, Motion Controller |
Command | Transmits motion instructions from the controller to drive | Digital (EtherCAT, CANopen), Analog (±10V, PWM) |
Servo Drive | Converts commands into motor power; closes loops if needed | Handles feedback, safety inputs, torque/velocity loops |
Motor | Converts electrical energy into mechanical motion | Brushed, Brushless, Linear |
Load | Object or system being moved | Includes inertia, friction, backlash, and resonance |
Feedback | Provides real-time position/velocity data to the controller or drive | Encoders (quadrature/sinusoidal), Resolvers, Hall sensors |
Controller
The controller is the decision-making element of a servo system. It generates motion paths, processes feedback, and adjusts commands in response to changing conditions.
In a typical setup, the controller sends commands to the servo drive, receives feedback from the motor or load, and corrects errors by updating output signals. Depending on the architecture, the controller may close position and velocity loops, while the drive closes the current loop. In more advanced systems, some or all control loops may be handled by the drive to reduce controller load.
Common Controller Types
Microcontrollers
Compact and cost-effective, but require significant programming effort. Loop control is often handled by the drive, with the microcontroller issuing basic commands.
PLCs
Designed for industrial environments, offering expandability, modular I/O, and reliable execution. PLCs balance cost and capability and are widely used in automated machinery.
Motion Controllers
Purpose-built for motion applications, often PC-based with advanced tuning, diagnostics, and multi-axis coordination. They offer the highest level of motion-specific control at a higher cost.
Command Interface
The command defines how motion instructions are transmitted from the controller to the drive.
Digital commands use industrial networks such as EtherCAT, CANopen, or Ethernet-based protocols, enabling high-speed communication, diagnostics, and multi-axis coordination.
Analog commands typically use ±10 V signals or PWM with direction control and are still common in simpler systems.
Servo Drive
The servo drive acts as the power interface between the controller and the motor. It converts low-energy command signals into the voltage and current required to drive the motor.
Modern drives do far more than power delivery. They often process feedback devices, manage safety inputs, and close torque, velocity, or even position loops. As drives become more capable, the functional boundary between controller and drive continues to narrow.
Motor
The motor converts electrical energy into mechanical motion. Servo systems use both rotary and linear motors depending on application needs.
Common motor categories include:
Brushed motors for simpler or legacy systems
Brushless servo motors for high efficiency, power density, and low maintenance
Linear motors for direct-drive applications requiring high speed and accuracy
Motor selection directly impacts performance, thermal behavior, and control complexity.
Load Considerations
The load includes the object being moved and all mechanical elements connected to it. Factors such as inertia, friction, backlash, and mechanical resonance influence tuning, stability, and achievable performance. Accurate load modeling is critical for reliable robotic motion.
Feedback Devices
Feedback ensures the motor or load reaches the commanded position or velocity. Controllers and drives use this data to continuously adjust output.
Absolute feedback provides position information immediately at power-up.
Incremental (relative) feedback requires a reference position before tracking motion.
Common feedback devices include encoders, resolvers, and Hall sensors, selected based on resolution, environment, and performance requirements.
At Pico Systems, motion control is treated as a complete, system-level solution rather than a set of individual components. Our Universal Stepper Controller simplifies multi-axis stepper setups, while the Universal PWM Controller provides precise control over servo motors.
By combining controllers, drives, feedback, and load dynamics into a unified system, Pico Systems helps industrial robotics achieve reliable precision, higher throughput, and long-term operational efficiency.
Main Motion Control Functions in Industrial Robotics
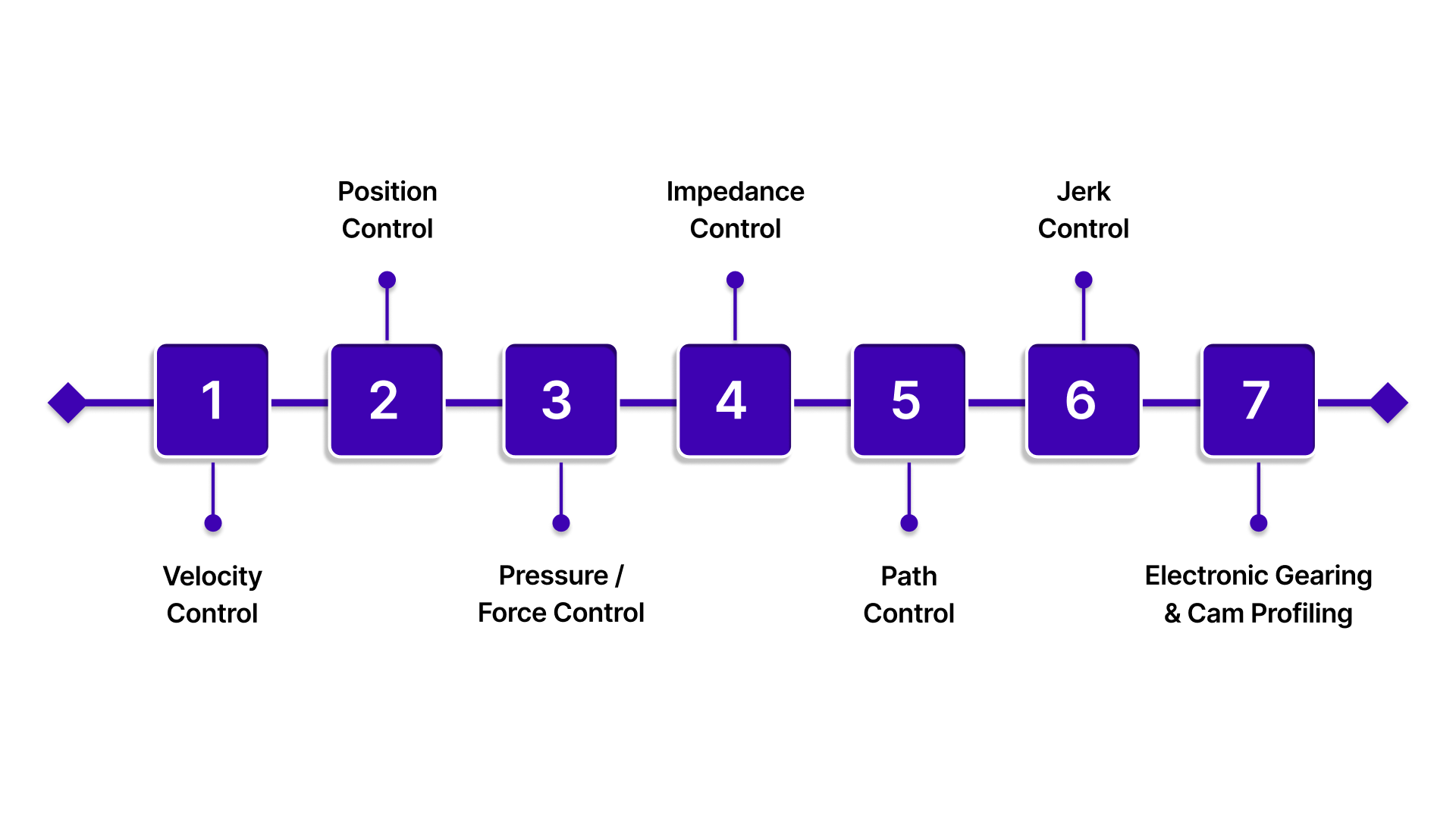
Motion control for industrial robotics relies on a set of core functions that ensure precise, repeatable, and safe operation. These functions manage how robots move, interact with loads, and respond to dynamic conditions. The main motion control functions include:
1. Velocity Control
Velocity control regulates the speed of movement accurately. It is essential for applications where consistent speed is critical, such as conveyor systems or automated fans. Smooth and precise velocity adjustments improve efficiency and reduce mechanical stress.
2. Position (Point-to-Point) Control
Position control moves a device from one specific location to another. Industrial robots and CNC machines depend on this for high-precision tasks. Motion trajectories are often calculated using:
Triangular profiles: Simple, direct movements.
Trapezoidal profiles: Include acceleration and deceleration phases.
S-Curve profiles: Smooth start and stop, reducing mechanical stress.
3. Pressure / Force Control
This function adjusts the applied force dynamically, allowing robots to handle varying loads without damaging components. Critical in assembly lines, packaging, or delicate operations, force control relies on advanced sensors and servo motors for precision.
4. Impedance Control
Impedance control modulates stiffness and damping in real-time, enabling robots to interact safely with dynamic environments. It’s key for tasks requiring delicate handling or adaptive responses to object properties.
5. Path Control
Path control ensures the robot follows a predefined trajectory accurately. Sophisticated algorithms optimize motion for speed, efficiency, and reduced wear on mechanical parts, making it ideal for cutting, welding, or assembly operations.
6. Jerk Control
Jerk control manages the rate of change of acceleration, smoothing starts and stops. This reduces mechanical stress, protects products, and prolongs machine lifespan in high-speed or delicate applications.
7. Electronic Gearing & Cam Profiling
These advanced techniques synchronize movements across multiple axes. Electronic gearing digitally mimics mechanical gears, while cam profiling programs precise, repetitive motions. Both are vital for multi-axis machines and synchronized assembly lines.
Additional Key Functions
Torque Control: Maintains consistent rotational force, crucial in tensioning and pressing applications.
Synchronization: Coordinates multiple axes to prevent collisions or process errors.
Feedback & Correction: Continuously monitors motion and applies corrections for deviations caused by load or friction.
Safety & Diagnostics: Includes emergency stops, overload protection, and predictive diagnostics to prevent downtime.
Looking to bring these motion control functions to life in your industrial robots? Our PWM Servo Amplifier delivers reliable velocity, torque, and position control for a wide range of applications. For high-performance and multi-axis systems, our Brushless PWM Servo Amplifier ensures smooth, precise motion with minimal tuning.
Explore Pico Systems’ range of motion control solutions to simplify integration, enhance precision, and keep your robotics operations running efficiently.
Motion Profiles in Motion Control for Industrial Robotics
In motion control for industrial robotics, the way a load moves is defined by its motion profile. A motion profile specifies velocity and acceleration over time, determining how smoothly and accurately a robot executes a move. Profiles can be simple, like a single-axis move from point A to point B, or complex, coordinating multiple axes simultaneously.
Key points to remember:
Velocity ∝ 1/T
Acceleration ∝ 1/T²
Power (peak) ∝ 1/T³
Note: Doubling the speed of a move requires eight times the peak power.
Constant Velocity
The constant velocity profile maintains a steady speed between start and end points. It’s suitable for simple applications like conveyors or fans.
Precision robotics rarely uses constant velocity because real systems cannot instantaneously change speed. Acceleration (Ta) and deceleration (Td) periods vary depending on load, causing minor deviations from the ideal profile.
Trapezoidal Profile
The trapezoidal profile ramps velocity linearly to create predictable acceleration and deceleration. Ta and Td are specified values, making moves more repeatable.
If Ta = Td = T/3, power usage is minimized.
Overshoot errors are small and acceptable for many systems.
Trapezoidal profiles work well for medium-precision machines but are less ideal for high-precision robotics.
S-Curve Profile
The S-curve profile gradually changes acceleration, reducing mechanical stress and vibration. Acceleration ramps up slowly, reaches a maximum, and ramps down at the end. This results in smooth, fast, and accurate motion, essential for high-performance industrial robots.
Torque and Power Calculations
Once the velocity profile is defined, the torque profile is derived from its slope:
Positive slope → positive torque
Negative slope → negative torque
The power curve comes from multiplying torque by speed:
Power=Torque×Speed\text{Power} = \text{Torque} \times \text{Speed} Power=Torque×Speed
Designing a Motion Control System
Motion profiles form the foundation for selecting motors and drives:
Motor selection: Match torque and speed requirements from the profile.
Electrical requirements: Determine peak current and voltage using motor constants (Kt, Kv, Rm).
Drive selection: Choose a servo drive that meets calculated current and voltage demands.
Key equations to remember:
Torque ∝ Current
Torque × Speed = Power
RMS torque matters for thermal and supply considerations
Applications of Motion Control for Industrial Robotics
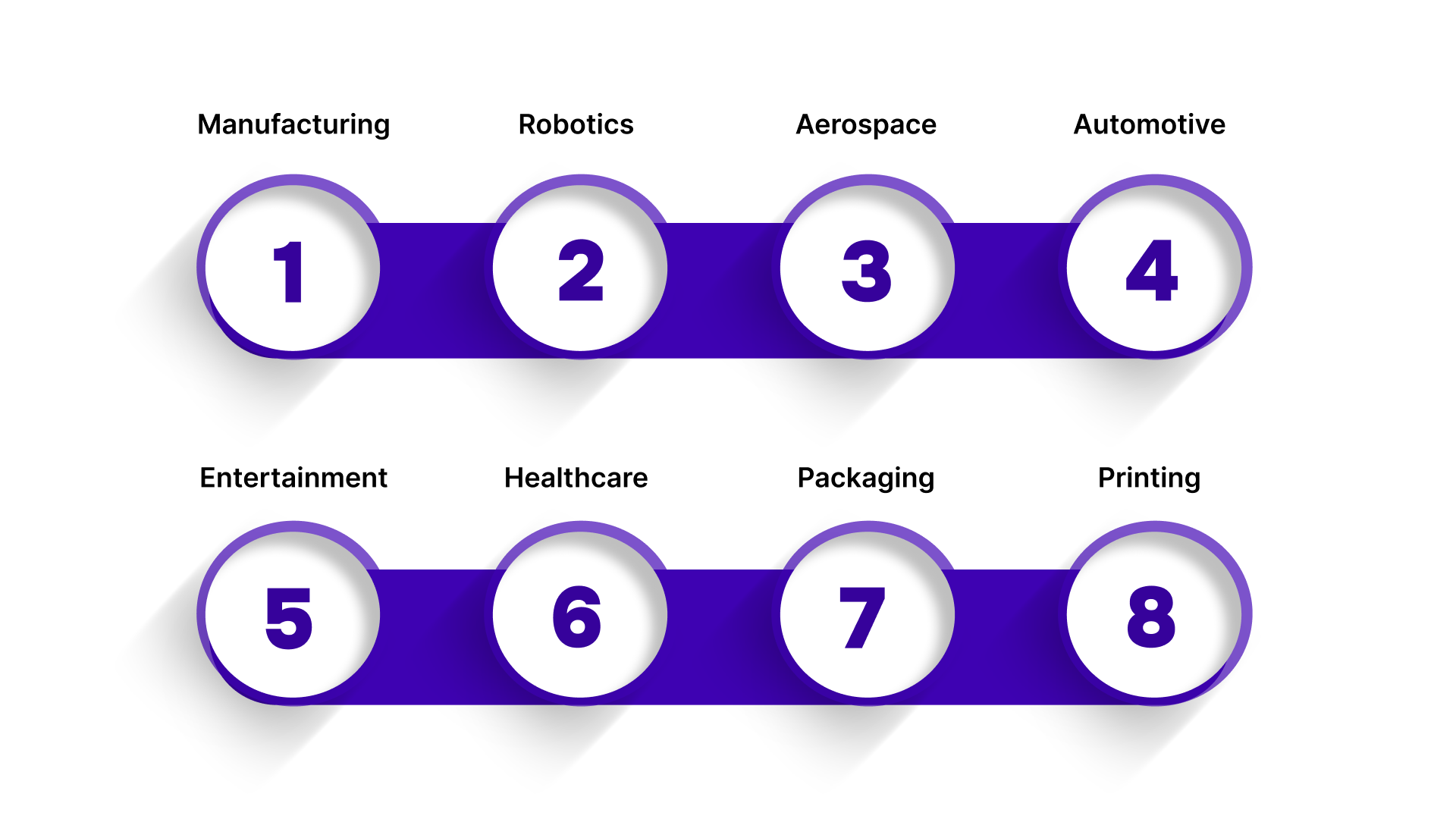
Motion control for industrial robotics isn’t limited to robotic arms on a factory floor. It plays a critical role across multiple industries where precision, repeatability, and speed are essential. Key applications include:
Manufacturing: Streamlines production lines, enhances assembly precision, and reduces downtime caused by mechanical errors.
Robotics: Enables precise movements in industrial automation and service robots, including medical and logistics applications.
Aerospace: Supports positioning and navigation systems, ensuring accurate handling and deployment of spacecraft and aircraft components.
Automotive: Powers automated assembly lines, improving part placement precision and overall vehicle quality.
Entertainment: Drives animatronics and special effects, creating realistic motion in movies and theme parks.
Healthcare: Controls surgical robots and diagnostic equipment, enabling precise operations and better outcomes.
Packaging: Handles goods at high speed with precision, boosting efficiency and reducing material waste.
Printing: Maintains high-resolution output by controlling the exact movements of printing heads for superior print quality.
Across these industries, motion control systems ensure tasks are executed consistently and accurately, making them indispensable for modern robotics and automation.
Pico Systems Solutions for Industrial Robotics
Precision, repeatability, and reliability define industrial robotics. Pico Systems provides hardware that delivers all three by handling motion control at the source.
Universal PWM Servo Controller: Multi-axis PWM generation with encoder feedback ensures smooth, coordinated motion for robotic arms.
Universal Stepper Controller: Hardware-level step pulses reduce lost steps, integrate real-time feedback, and simplify emergency stop logic.
Resolver & Encoder Converters: Convert legacy or non-standard sensors into precise feedback signals, ensuring accurate closed-loop control.
With Pico Systems, you get deterministic motion, stable closed-loop behavior, and seamless integration, turning complex robotic motion into predictable, repeatable performance without guesswork.
Final Thoughts
Effective motion control for industrial robotics is the backbone of precision, speed, and repeatability in modern automation. From robotic arms on production lines to surgical robots in healthcare, the right control systems ensure consistent performance, minimal errors, and long-term reliability.
Pico Systems provides solutions designed to make motion control predictable, accurate, and easy to integrate. Whether you need high-resolution feedback, multi-axis control, or seamless legacy integration, our hardware simplifies complex robotic motion while enhancing stability and precision.
Get in touch with us today to discuss how Pico Systems can optimize motion control for your robotics applications and help you achieve reliable, repeatable, and precise motion.
FAQs
What is motion control for industrial robotics?
It is the system that precisely controls the movement of robotic actuators to ensure repeatable and accurate motion.
Why is feedback important in robotic motion control?
Feedback from encoders or resolvers allows the system to correct deviations in real time, ensuring accuracy and repeatability.
Which Pico Systems products are ideal for robotics?
Controllers like the Universal PWM Servo Controller and Universal Stepper Controller, along with resolver/encoder converters, are designed for precise multi-axis motion control.
Can Pico Systems hardware integrate with legacy motors?
Yes. Resolver and encoder converters allow older or non-standard sensors to feed accurate signals into modern motion control systems.
How does motion control improve robotic efficiency?
It ensures smooth, coordinated movement, reduces errors, minimizes downtime, and supports high-speed automation with precision.