This article lists the top ten manufacturers producing dedicated LinuxCNC-compatible motion controller boards, along with criteria to guide your selection.
Key Takeaways
- LinuxCNC motion controller boards handle real-time pulse generation and I/O, offloading timing-critical tasks from the host PC
- Ethernet, PCI/PCIe, and FPGA-buffered parallel port connections offer the most reliable performance for LinuxCNC systems
- Mesa Electronics dominates the market, but Pico Systems, Vital Systems, and CNC4PC also serve specific use cases
- Select boards based on HAL driver availability, axis count, I/O expansion options, latency performance, and connection interface
- Verify HAL driver support in the current LinuxCNC release before purchasing any board
What Is a LinuxCNC Motion Controller Board?
A LinuxCNC motion controller board is a hardware interface that sits between the LinuxCNC host PC and the machine's motor drives. It generates real-time step/direction pulses or analog velocity commands—tasks that cannot be reliably handled through a standard USB port or software alone due to USB's non-deterministic latency.
Breakout Board vs. Motion Controller Board
There's a crucial distinction between a basic parallel port breakout board and a true motion controller board:
- Breakout boards passively route signals from the parallel port. Pulse timing depends entirely on the PC's real-time kernel, so output quality varies with host hardware.
- Motion controller boards contain an onboard FPGA or microcontroller that handles pulse generation independently, delivering deterministic, high-frequency output regardless of PC latency.
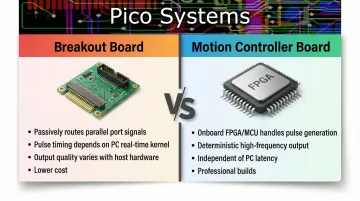
FPGA-based boards are the go-to choice for professional LinuxCNC builds because they offload time-critical tasks to dedicated hardware.
The Role of HAL
For a board to work with LinuxCNC, it must have a supported HAL driver—either officially included in the LinuxCNC distribution or actively maintained by the community. The HAL driver exposes the board's physical pins (inputs and outputs) to LinuxCNC's control system. Confirming HAL driver availability before purchase is the single most critical compatibility check.
Top 10 LinuxCNC Motion Controller Board Manufacturers
These manufacturers are recognized within the LinuxCNC community for producing boards with verified HAL driver support, reliable real-time performance, and active documentation or community backing.
Mesa Electronics
Mesa Electronics is the leading FPGA-based motion controller board manufacturer for LinuxCNC. Their product range includes the 5i25 (PCI), 7i76E (Ethernet), 7i92 (Ethernet), and 7i96S (Ethernet), among others. All Mesa FPGA boards use the hostmot2 HAL driver, which is natively integrated into LinuxCNC distributions.
Differentiators:
- FPGA architecture delivers deterministic real-time control with minimal jitter
- Broad daughter-card ecosystem for I/O expansion via Smart Serial
- Ethernet and PCI/PCIe connection options for modern and legacy PCs
- Extremely active community support on the LinuxCNC forum
| Connection Type | Supported Axes / I/O | Best For |
|---|---|---|
| Ethernet, PCI, PCIe | 4-6 axes typical; expandable to 16+ with daughter cards; 48+ I/O points | Servo systems, high-axis-count machines, industrial retrofits |
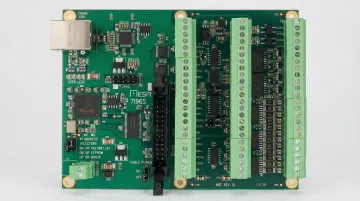
Mesa boards like the 7i96S are frequently recommended for standard 5-axis stepper machines due to their all-in-one design, ease of setup, and native LinuxCNC support. The 7i76E is popular for machines requiring extensive I/O and encoder feedback.
Pico Systems
Pico Systems is a U.S.-based manufacturer specializing in LinuxCNC-compatible motion control interfaces. Their flagship products include the Universal Stepper Controller (USC) and Universal PWM Controller (UPC), both priced at $250 and designed for interfacing stepper and servo drive systems.
Differentiators:
- Maintains encoder position feedback when drives shut down during E-stop — without this, machines lose position and require full rehoming before operation can resume
- Compatible with industrial servo amplifiers from Copley Controls, AMC, Gecko, and others
- Technical depth in servo and stepper control systems makes them ideal for motion control system developers and CNC machine builders
| Key Products | Compatibility | Best For |
|---|---|---|
| USC (Universal Stepper Controller), UPC (Universal PWM Controller) | LinuxCNC HAL driver support; interfaces with Copley Controls, Gecko, AMC, and compatible servo/stepper amplifiers | Industrial CNC builds requiring servo loop integrity, emergency stop position retention, and professional motion control integration |
The USC generates step rates up to 250,000 pulses per second per axis across 4 axes. The UPC offers 4-axis PWM servo control with 10 MHz encoder counting and 25 ns PWM granularity. Both connect via parallel port and support daisy-chaining for expanded axis counts.
Vital Systems
Vital Systems manufactures the Motenc series of motion controller boards, including the Motenc-Lite, which are PCI-based cards designed for precision analog servo applications. Vital Systems has a history as an early LinuxCNC-compatible hardware vendor.
Differentiators:
- Specialized for closed-loop servo control with high-resolution encoder feedback
- 8 analog outputs (DAC) for servo command signals (±10V)
- 8 analog inputs (ADC) and 4 differential quadrature encoder inputs with 32-bit resolution
- Targeted at analog servo drive retrofits requiring precision positioning
| Connection Type | Supported Axes / I/O | Best For |
|---|---|---|
| PCI | 4-axis closed-loop control; 8 DAC outputs, 8 ADC inputs, 4 encoder inputs, 48 digital I/O | Analog servo drive systems, retrofit applications, legacy PCI-based industrial machines |
The Motenc-Lite uses the hal_motenc driver. This driver is considered legacy — users on modern "uspace" LinuxCNC distributions should expect manual compilation and limited community troubleshooting resources.
CNC4PC
CNC4PC offers a wide range of breakout boards and motion controllers. Their parallel port breakout boards (such as the C35S) are compatible with LinuxCNC using the standard hal_parport driver. These are simple signal buffers without onboard intelligence.
Differentiators:
- Broad product range from entry-level to mid-range CNC builds
- Accessible pricing for hobbyist-to-professional applications
- Parallel port boards are straightforward and well-documented
Important Note: CNC4PC's Ethernet motion controllers (like the C25XP and AXBB-E) are designed primarily for Mach3, Mach4, and UCCNC. These boards do not have official LinuxCNC HAL drivers and are generally incompatible with LinuxCNC.
| Connection Type | Price Range | Best For |
|---|---|---|
| Parallel port (LinuxCNC compatible); Ethernet (Mach3/Mach4 only) | $50-$150 | Entry-level to mid-range CNC builds using parallel port with LinuxCNC; Ethernet boards are NOT LinuxCNC compatible |
If you're building a LinuxCNC machine, stick to CNC4PC's parallel port breakout boards and verify HAL driver support before purchasing.
NVEM / Ethernet Motion Controllers (Chinese Manufacturers)
Low-cost Ethernet motion controllers like the NVEM, EC300, and EC500 are widely available from Chinese manufacturers (such as Novusun). These boards were originally designed as Mach3 controllers using STM32 microcontrollers.
Differentiators:
- Significant cost advantage compared to Mesa boards (often under $100)
- Community-developed LinuxCNC support via the Remora firmware project
- Suitable for budget-conscious builds where Mesa pricing is a barrier
Limitations:
- No official manufacturer-provided HAL driver for LinuxCNC
- Step rate limits (typically up to 200 kHz) are lower than dedicated FPGA boards
- Some users have reported logical wiring errors in PCB designs
- Community support is less mature than Mesa or Pico Systems
| Connection Type | Supported Axes / I/O | Best For |
|---|---|---|
| Ethernet | 4-6 axes; varies by model; digital I/O for home/limit switches | Budget-conscious builds where Mesa pricing is a barrier; users comfortable with community firmware |
To use these boards with LinuxCNC: Replace the stock firmware with Remora firmware and follow community documentation for setup.
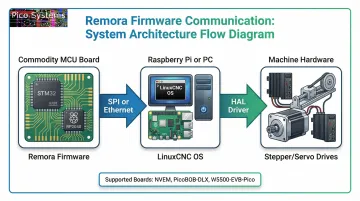
Remora-Compatible Board Manufacturers (STM32/RPi-Based)
Remora is an open-source firmware project that turns commodity microcontroller boards into LinuxCNC motion controllers. It runs on a microcontroller (MCU) and communicates with a Raspberry Pi (running LinuxCNC) via SPI, or with a PC via Ethernet.
Supported Hardware:
- STM32 Boards: NVEM, EC500 (legacy support)
- RP2040 Boards: WIZnet W5500-EVB-Pico (Raspberry Pi Pico with Ethernet), PicoBOB-DLX (designed by Expatria Technologies specifically for LinuxCNC Remora)
Differentiators:
- Real-time co-processor offloading via SPI to a Raspberry Pi running LinuxCNC
- Cost-effective solution for small-format machines
- Open-source firmware with active community development
| Connection Type | Supported Axes / I/O | Best For |
|---|---|---|
| SPI (to Raspberry Pi running LinuxCNC) or Ethernet | 4-6 axes; digital I/O; encoder inputs | Small-format CNC routers, plasma cutters, 3D printers, Raspberry Pi LinuxCNC builds |
For makers building compact machines on a budget, Remora closes the gap between cheap commodity hardware and LinuxCNC's real-time motion control requirements.
Granite Devices
Granite Devices produces high-end servo drives, including the IONI servo drive, which uses the SimpleMotion V2 bus (RS485-based) for communication. The IONI supports 4-axis control, 0-10V analog input, PWM, and quadrature encoder feedback.
Differentiators:
- High-performance servo control with torque, velocity, and position modes
- Encoder resolution support for precision positioning
- Suitable for demanding CNC and robotics applications
LinuxCNC Integration:
A HAL driver for the SimpleMotion V2 bus has been discussed in the community and is under development. However, many users interface IONI drives with LinuxCNC via standard step/direction or analog signals using a Mesa card, rather than the SimpleMotion bus directly.
| Connection Type | Supported Axes / I/O | Best For |
|---|---|---|
| USB, SimpleMotion V2 bus (RS485) | 4 axes; encoder feedback; analog/PWM input | High-performance servo CNC and robotics applications requiring advanced drive features |
The SimpleMotion V2 HAL driver remains community-developed rather than officially released — plan to use Mesa step/direction or analog interfacing until that driver matures.
Beckhoff Automation (EtherCAT)
Beckhoff is an industrial automation company offering EtherCAT-based I/O and motion controller hardware. Beckhoff hardware is compatible with LinuxCNC via the linuxcnc-ethercat (lcec) HAL driver, which allows LinuxCNC to act as an EtherCAT master.
Differentiators:
- Extreme determinism: EtherCAT supports cycle times as low as 12.5 µs with synchronization jitter under 1 µs
- Distributed I/O architecture allows for highly scalable multi-axis systems
- Industrial-grade reliability and performance
- Suitable for large-scale machine builds requiring precise synchronization across many axes
Cost Consideration:
Beckhoff hardware commands a significant cost premium compared to Mesa or Pico Systems boards, but delivers unmatched performance for industrial applications.
| Connection Type | Supported Axes / I/O | Best For |
|---|---|---|
| EtherCAT | Highly scalable via distributed I/O modules; 8+ axes common | Large-scale industrial LinuxCNC machine builds requiring distributed I/O and sub-millisecond synchronization |
At this performance tier, the cost premium is real — but for high-axis-count production machines and research labs where sub-millisecond synchronization is non-negotiable, no other option in the LinuxCNC ecosystem compares.
PLUTO-P (Jens Thoms Toerring / Community)
The PLUTO-P is a legacy FPGA board developed by the LinuxCNC community. It uses an ACEX1K FPGA chip and connects via parallel port, offering FPGA-based pulse generation as a step up from simple breakout boards.
Differentiators:
- FPGA-based pulse generation over parallel port
- 4 step/direction channels with a maximum step rate of 312.5 kHz
- 14 digital outputs and 16 digital inputs
- Official HAL drivers (pluto_step for steppers, pluto_servo for servos) included in LinuxCNC
| Connection Type | Supported Axes / I/O | Best For |
|---|---|---|
| Parallel Port (FPGA-buffered) | 4 step/direction channels; 14 outputs, 16 inputs | Older machines with parallel port infrastructure, cost-sensitive FPGA builds, legacy system retrofits |
The PLUTO-P remains officially supported in LinuxCNC, but new builds rarely justify it over a Mesa Ethernet board — the performance ceiling is lower and the parallel port dependency limits modern PC compatibility.
How We Chose These Manufacturers
We applied two primary filters to identify these manufacturers:
Verified LinuxCNC HAL driver support: The board must have a HAL driver either officially included in LinuxCNC or actively maintained by the community. We cross-referenced manufacturers with the LinuxCNC Supported Hardware wiki and the HAL Component List.
Demonstrated real-world use: Manufacturers were selected based on forum discussions, community wikis, and product documentation explicitly referencing LinuxCNC compatibility — not just marketing claims.
Common Mistakes Buyers Make:
- Purchasing boards advertised as "CNC motion controllers" without confirming LinuxCNC HAL driver availability
- Confusing Mach3/Mach4 motion controllers (such as Ethernet SmoothStepper) with LinuxCNC-compatible hardware
- Choosing parallel port breakout boards without accounting for PC latency limitations on modern hardware
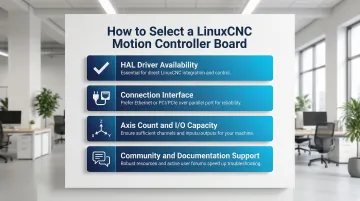
Selection Criteria:
- Ethernet and PCI/PCIe interfaces over parallel port — lower latency, better compatibility with modern PCs
- Axis and encoder capacity sufficient to scale with machine complexity
- Setup guides, wiring diagrams, and configuration examples available from the manufacturer
- Active community forums and responsive manufacturer support
Conclusion
Selecting the right LinuxCNC motion controller board goes beyond price. HAL driver availability, connection type, and real-time performance define whether your build will be stable and precise at production speeds.
Before purchasing, take these steps:
- Confirm HAL driver support in the current LinuxCNC release
- Assess your axis count and I/O requirements for both current and future machine configurations
- Weigh community support availability as a long-term maintenance factor
- Choose Ethernet or PCI/PCIe interfaces over parallel port when possible
For builders who need those criteria met with industrial servo and stepper systems—particularly those requiring position retention during E-stops and compatibility with industrial servo amplifiers—Pico Systems makes motion control hardware specifically designed for these applications. Reach them at elson@pico-systems.com or +1 314-965-5523.
Frequently Asked Questions
What is the recommended hardware for LinuxCNC?
Mesa Electronics FPGA boards — such as the 7i76E or 7i96S via Ethernet — are the community standard for LinuxCNC. They offer native hostmot2 HAL driver support, low latency, and broad I/O options. Pico Systems boards are also well-regarded for servo and stepper-based builds requiring industrial-grade reliability.
What is the difference between a breakout board and a motion controller board for LinuxCNC?
A breakout board passively routes signals from a parallel port and depends on the PC's real-time kernel for pulse timing. A motion controller board (typically FPGA or microcontroller-based) generates step/direction pulses independently on dedicated hardware, resulting in more deterministic and higher-frequency motion output.
Can I use a USB motion controller board with LinuxCNC?
No. LinuxCNC does not natively support USB for real-time motion control due to USB's non-deterministic latency. Ethernet-based and PCI/PCIe FPGA boards are the preferred alternatives. Some STM32-based boards using Remora firmware connect via SPI to a Raspberry Pi running LinuxCNC as a workaround.
How do I verify that a motion controller board is compatible with LinuxCNC?
Check the LinuxCNC official hardware documentation, the LinuxCNC forum, and the HAL driver list included with the LinuxCNC distribution. A board is compatible if its HAL driver is included in the LinuxCNC package or available as an actively maintained community driver.
What connection type offers the best performance for LinuxCNC motion controller boards?
Ethernet (using boards like Mesa's 7i76E) and PCI/PCIe (like Mesa's 5i25) are the preferred interfaces. Ethernet is particularly recommended for modern PCs lacking PCI slots. Parallel port with FPGA buffering (such as PLUTO-P) is a viable lower-cost option but less flexible than Ethernet.
How many axes can a LinuxCNC motion controller board support?
Axis count depends on the specific board and its daughter card configuration. Mesa FPGA boards support 4 to 16+ axes depending on firmware configuration and expansion cards. Most mid-range boards support 4-6 axes, sufficient for 5-axis CNC mills or multi-axis plasma/laser systems.